
First, a quick word on why we would want to do this. The Sharp ir rangers are a very effective means of measuring distance. While ultrasonic sensors (for more about those see the Sensors label) can be fooled by textures and echos, ir sensors are more susceptible to interference from outside light sources and changes in material reflectivity. Therefore, if a cheap measurement system is required in a varying environment (eg, a mobile robot) a combination of ultrasonic rangers and ir rangers can be quite effective.
If you have found this page, you probably already know this, but I will state it anyway. Sharp ir sensors have an analog output. However, the analog value does not have a linear relationship to distance. In this exercise we will find the function that does relate the two and use that to take an analog value and convert it to a distance.
Wiring
As stated above, the sensor has an analog output. Connect the red lead to +5V, black lead to GND, and yellow lead to A0.

Aquire Data
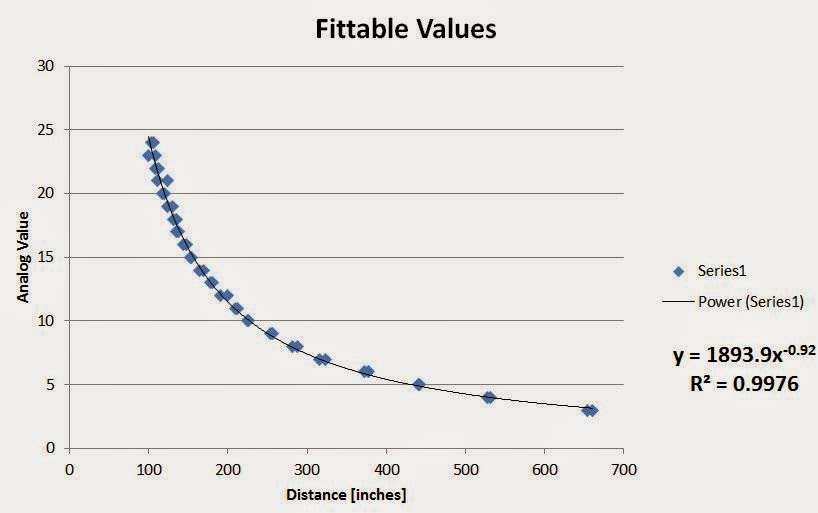
I used a simple sketch that took the average of 5 values and printed it to the screen. I then manually copied it into an excel spreadsheet along with the measured distance value.


Once you have acquired the data, plot it. Some points will most likely fall outside of the trend. Exclude those points and fit the rest. My fit was Value = 1893.9*Distance^-0.92.
Use Equation
Solving the equation I got above for Distance gets me this, Distance = (1893.9*Value) ^-1.087.
This is something we can plug into Arduino code. At this point it is only right to note that the method I am using will involve floating point math. There are methods that avoid that. If processing power is at a premium, you might want to check those out.
The important piece of code looks like this:
float Distance = pow((sensorValue / 1893.9), -1.087);
If you want the whole thing, you can download my code HERE.
That's all I have. I hope it was useful.
-Matthew
-Matthew
No comments:
Post a Comment